Robot Rosie
- Other
- Prototype
- Arduino
- Electronics
- Visual Basic
TU Delft Elective: Mechatronics & Software
Feb. 2011 - Apr. 2011
Mike Bond
Robert van den Born
Jens Johansen
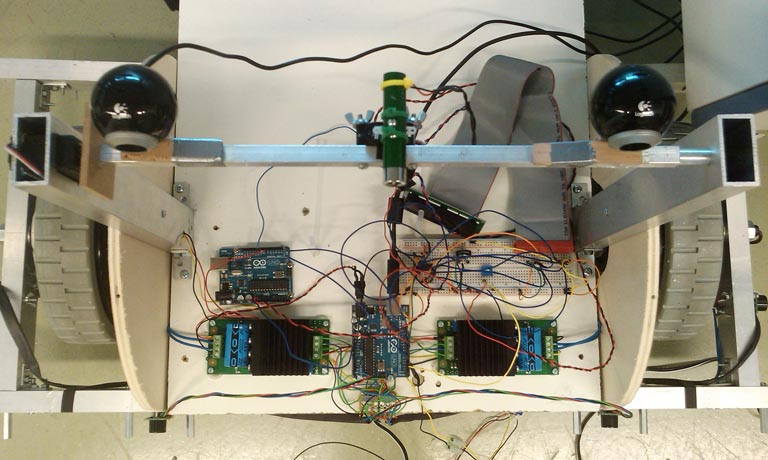
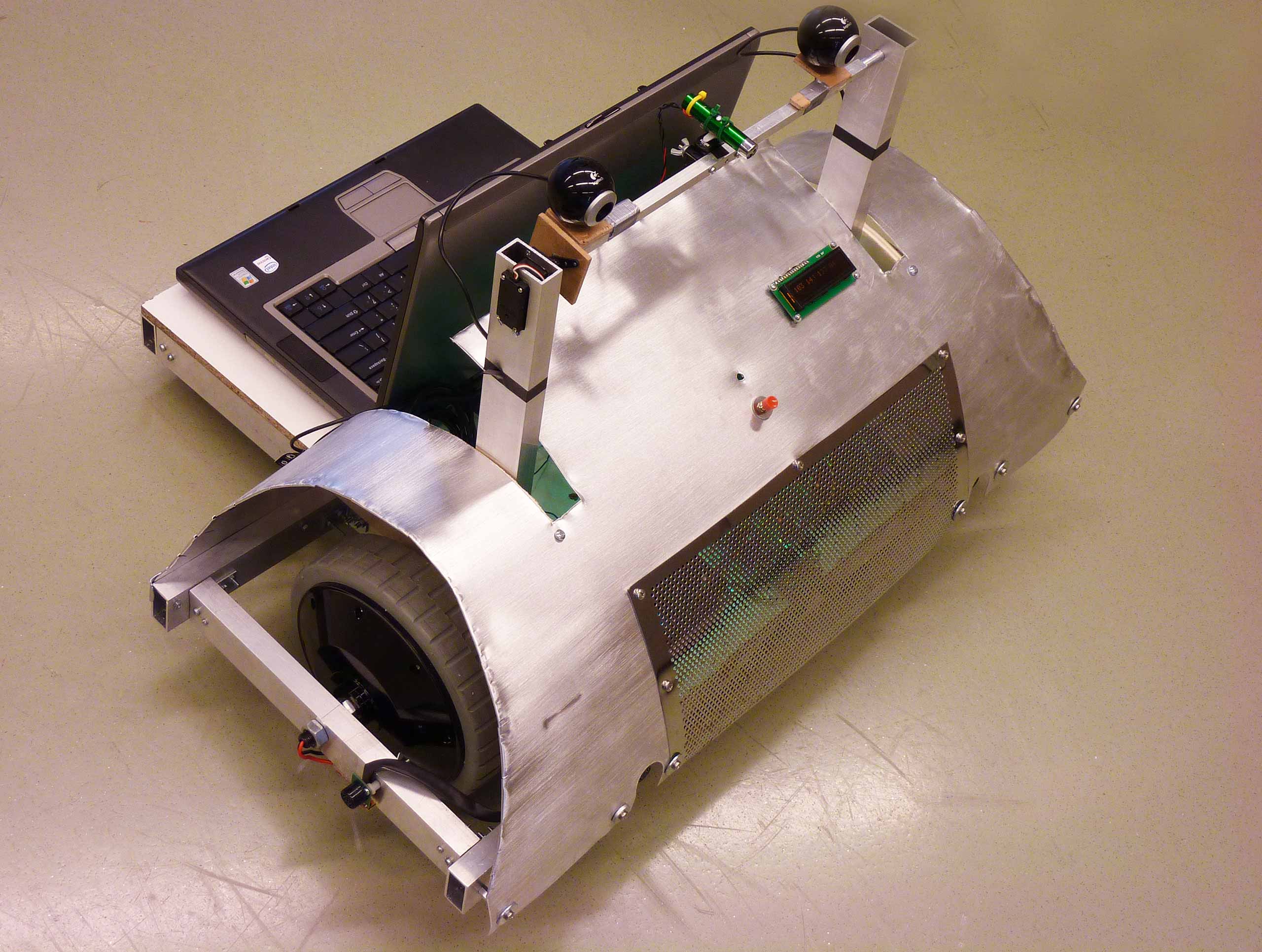
For an elective we had to create a robot that uses stereoscopic camera vision to track and 'shoot' a laser at an object of a designated colour. It had to be designed in such a way that when the target is lost the robot can autonomously move around to relocate the target while avoiding obstacles.
At the final stage the robot was required to complete a test track. The laptop on the robot was running software that calculated the distance to an object using a video feed from two web cams, in the same way that humans perceive distance.
The robot had the instructions to track an object of a predefined colour, and send commands to an Arduino programmed to control the motors. At a certain distance to the target a laser pointer is turned on and aimed at the object.